Abstract
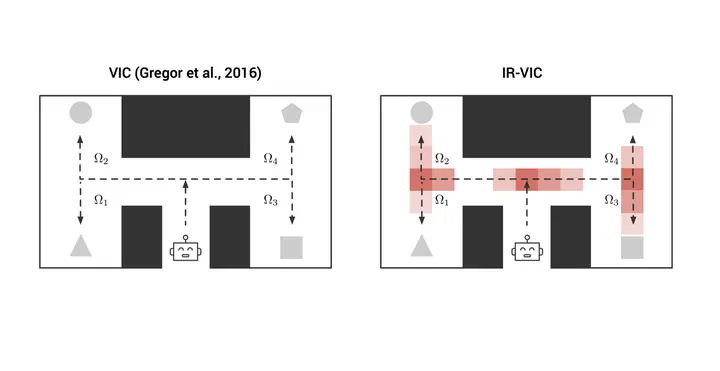
We propose a novel framework to identify sub-goals useful for exploration in sequential decision making tasks under partial observability. We utilize the variational intrinsic control framework (Gregor et al., 2016) which maximizes empowerment – the ability to reliably reach a diverse set of states and show how to identify sub-goals as states with high necessary option information through an information theoretic regularizer. Despite being discovered without explicit goal supervision, our sub-goals provide better exploration and sample complexity on challenging grid-world navigation tasks compared to supervised counterparts in prior work.
Type
Publication
In International Joint Conference on Artificial Intelligence, Yokohoma, Japan, 2020